Automatický systém pro příjem WX satelitů
Při brouzdání po internetu jsem nalezl naprosto perfektní program pro příjem obrázků z meteosatelitů WXtoImg. Tento program má velkou řadu vymožeností a co je hlavní umí přelaďovat přijímač po sériovém portu PC. Rozhodl jsem se postavit řídící jednotku k WX přijímači, která by uměla komunikovat s tímto programem a tím vytvořit naprosto automatický systém pro příjem obrázků.
Po spuštění programu WXtoImg a nastavení do režimu záznamu se čeká na přílet družice NOAA dle nastavených kritérií a v okamžiku příletu dá WXtoImg povel po sériovém portu k přeladění přijímače na příslušný kmitočet dle družice. Po nasnímání obrázku WXtoImg opět čeká na přílet další družice a celý děj se opakuje. Takto můžete mít spuštěné snímání nepřetržitě. Předpokladem správné funkce jsou aktuální keplery, správně udaná poloha a dobře seřízený čas v PC.
Wx přijímač se skládá z Vf části, kterou jsem postavil dle OK2XDX - viz A-Radio 3-4/97 a vlastního řídícího počítače. Srdcem řídícího počítače je PIC16F84A s příslušným programem - ke stažení včetně nastavení pojistek procesoru v tomto hexu.
Dále bude popisována pouze řídící jednotka.
Nastavení WXtoImg pro ovládání přijímače
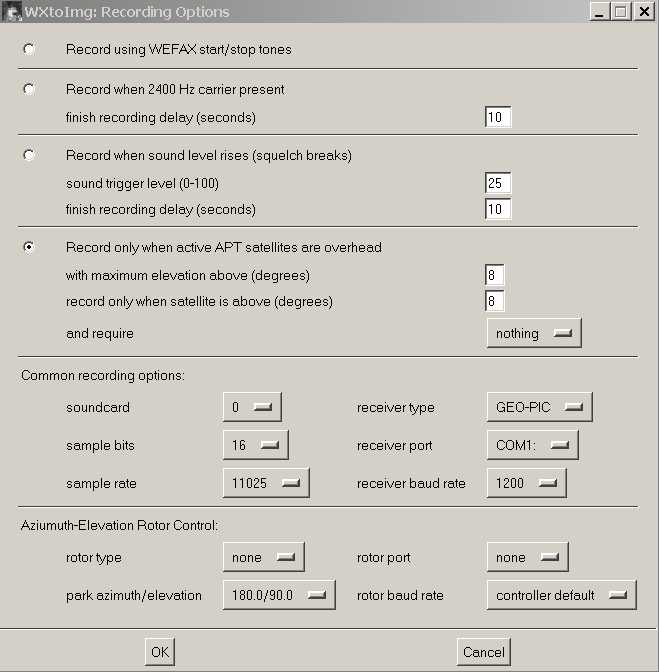
Pro správnou funkci je potřeba nastavit program WXtoImg dle následujícího obrázku:
Receiver type: zvolit GEO-PIC - zde je změna od 20.5.2005 kvůli NOAA18.
Receiver port: zvolit port, ke kterému máte připojený přijímač
Receiver baud rate: nastavit 1200
Hodnoty elevace samozřejmě nastavte dle své pozice. Já mám výhled do všech stran, tak si mohu dovolit nastavit elevaci již od 8°.
Funkce řídící jednotky
Celý přijímač se ovládá jedním tlačítkem, provozní stavy jsou zobrazovány na LCD. Po zapnutí přijímače se naladí kmitočet 137,5MHz a postupným stiskáváním tlačítka se skáče po kanálech s kmitočty 141MHz (kvůli 2. kanálu meteosatu), 137,1MHz, 137,3MHz, 137,38MHz, 137,4MHz, 137,62MHz, 137,84MHz, 137,9125MHz. Dalším stiskem tlačítka se na displeji objeví nápis LADENI PO RS232 a přijímač čeká na data od programu WXtoImg. V případě, že v tomto stavu přijdou do přijímače data pro přeladění, na displeji se objeví kmitočet s písmenem A. Opětovným stiskem tlačítka v jakémkoliv stavu automatického řízení se naladí kmitočet 137,5MHz a celé ladění se opakuje. Pokud tedy chceme automatický příjem necháme přijímač s nápisem LADENI PO RS232 na displeji, případně ve stavu, kdy za kmitočtem svítí A.
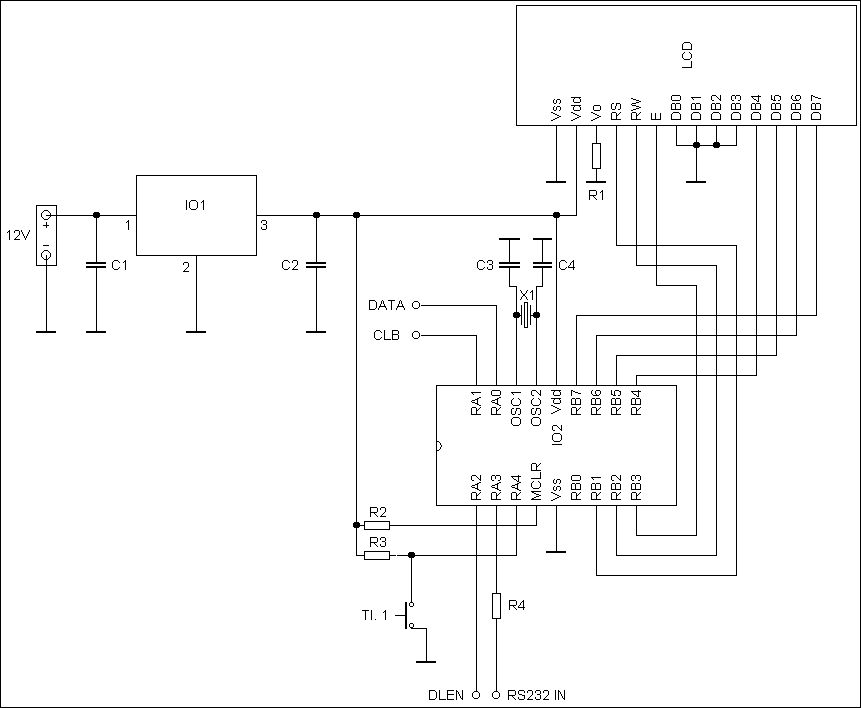
Schéma
 .
.
Osazovák
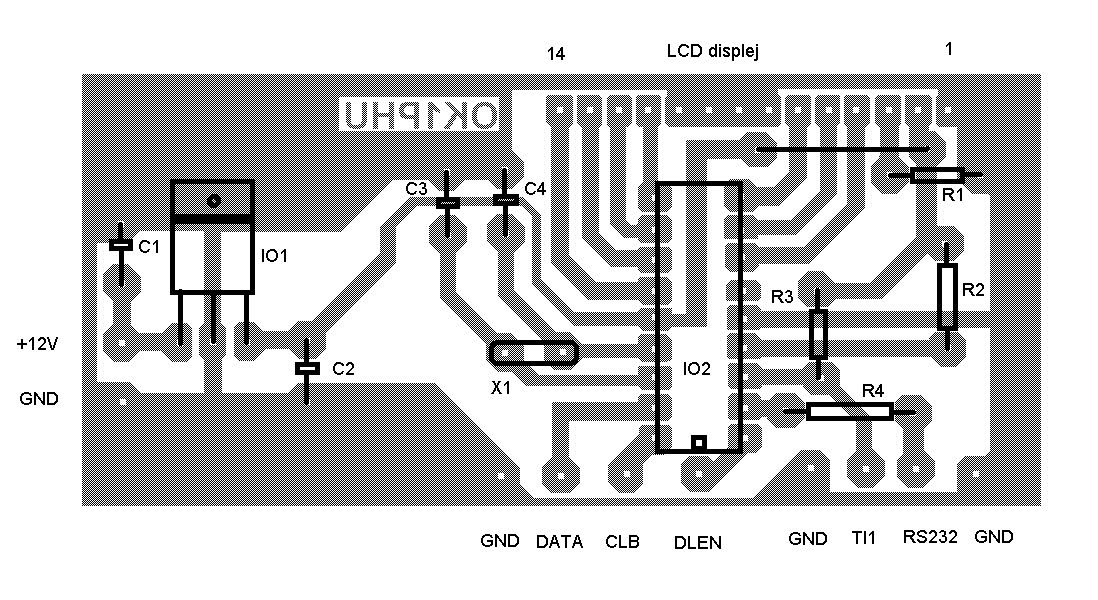
Plošný spoj
Rozměr plošného spoje je totožný s rozměrem LCD displeje. Omlouvám se za různě tlusté čáry a za obrázek mimo měřítko, ale v době kdy jsem to dělal to lépe nešlo.
Konstrukce
Osadíme všechny součástky, kromě jednočipu a displeje. Do desky přivedeme napětí 12V a zkontrolujeme 5V na jednočipu a na pinech pro displej. Pokud je vše v pořádku vložíme do patice jednočip a přimontujeme displej. Deska řízení a displej jsou k sobě sešroubovány přes distanční sloupky stranami spojů. Pro propojení displeje a desky řízení použijeme plochý kabel, nebo jiný systém. Já osobně jsem do desky řízení ze strany spojů napájel dutinky z FRB konektorů, do displeje jsem napájel nože pro jumpery ze základních desek a potom do sebe desky nasunul a zajistil šroubky přes distanční sloupky.
Po přivedení napájení 12V se na displeji musí zobrazit logo a po chvíli kmitočet 137,5MHz. Stiskem tlačítka se musí na displeji měnit kmitočet dle výše uvedených kanálů a nápis LADENI PO RS232. Pokud vše funguje můžeme řídící jednotku propojit s vf. částí a provést nastavení PLL s obvodem SAA1057, vše je popsáno ve výše uvedených A-Radiích. K eliminaci rušení z řídící jednotky doporučuji vše propojovat stíněnými kablíky. Vývod označený RS232 na řídící jednotce propojíme s pinem TX u sériového portu PC. Vývod označený GND na řídící jednotce propojíme s příslušným pinem GND u sériového portu PC.
Seznam součástek
IO1 7805
IO2 PIC16F84A
C1, C2 100nF
C3, C4 56pF
R1, R2 1kohm
R3 10kohm
R4 22kohm
X1 4MHz
LCD 16x1 s řadičem HD44780
Stavba řídícího počítače by neměla dělat žádné problémy a při použití dobrých součástek musí fungovat na první pokus.
Pracujte však pečlivě, v žádném případě nenesu zodpovědnost za to, že si něco zničíte.
Takhle to vypadá hotové už i s vf. částí a zdrojem v krabici: